
モビリティ研究 知能化モビリティ研究
知能化モビリティグループ
知能化モビリティ研究では、高齢運転者の安全性・安心感を向上させるモビリティを、自動運転知能と高度運転支援知能によって実現します。そのために、1)周囲の環境を理解する機能(環境理解)と、2)ドライバの個性・能力に合わせて上手な運転に誘導する機能(人間機械協調)が重要です。我々は、その中核技術である自車位置推定、歩行者意図推定、指導員型運転支援を主として研究および開発し、いつまでも活き活きと健康で暮らせる社会の実現に貢献します。
| Keyword |
モビリティ知能化、環境理解、人間機械協調 |
|---|
グループ体制
知能化モビリティグループ
|
平山 高嗣
人間の認識特性に倣った環境理解技術の研究を行っています。本プロジェクトでは主に、運転者と歩行者が何をいつ認識して、どう判断しているかを分析・モデル化し、自動運転および高度運転支援のための環境理解の基準創りを進めています。 人間の視線を含む行動、人間を取り巻く環境やコンテキストそれぞれに加え、それらの間にあるマルチモーダルな関係を定量的に記述することが重要で、映像等のパターン認識や機械学習を応用して研究に取り組んでいます。また、交通のみならず、あらゆる事象の基本原理であると考えられるインタラクションを数理モデル化し、体系化するという挑戦を若手研究者と推進しています。 この研究活動に基づいて、意思疎通や阿吽の呼吸を感じられるクルマの実現を目指します。 |
|
|
詳細プロフィール |
|
|
メールアドレス |
takatsugu.hirayama[at]nagoya-u.jp |
 名古屋大学
大学院情報学研究科(客員)
名古屋大学
大学院情報学研究科(客員)環境理解ユニット
|
村瀬 洋
画像認識の研究を一貫して行ってきました。特に、汎用的な物体認識手法として多数の国際論文で引用されている「パラメトリック固有空間法」の提案者としても知られています。 また、膨大な映像や音声を高速に探索する「アクティブ探索法」の発案者であり、これら画像認識に関する一連の研究により、紫綬褒章を受章しました。 IEEEのITS名古屋チャプターを設立させ、初代Chairとして東海地区のITS分野の発展に尽力しています。IEEE、電子情報通信学会、情報処理学会のフェローです。 名古屋大学COIでは、高度運転支援や自動運転を実現するための主要な要素技術の一つである環境理解を担当しています。 |
|
|
詳細プロフィール |
|
|
メールアドレス |
murase[at]is.nagoya-u.ac.jp |
 名古屋大学 大学院情報学研究科
名古屋大学 大学院情報学研究科ユニットについて
|
高齢者事故の多い出合い頭での一旦停止や、ストレスの多い夜間走行で適切な運転支援をするためには、それぞれの状況において、車両の周辺環境がどのようになっているのかを把握し、生じうる交通事故のリスクを予測することが必要です。 環境理解ユニットでは、こうした状況において、交通事故のリスクを予測するための周辺環境認識技術の開発を行っています。特に、きめ細かな予測を実現するため、高精度な歩行者検出だけでなく、その人物が大人か子供か、こちらに気付いているかどうか、道路に飛び出してきそうかどうか、といった属性の推定技術について研究を行っています。 |
クリックで拡大 |
||
|
詳細/関連 |
|||
|---|---|---|---|
|
メンバー |
出口 大輔 名 |
井手 一郎 名 劉 海龍 |
茂木 宗岐 |
|
他機関メンバー ※名古屋大学招へい・客員 |
新村 文郷 rm |
||

人間機械協調制御ユニット
|
鈴木 達也
1964年1月3日生れ。1991年名古屋大学大学院博士課程後期課程電子機械工学専攻修了。工学博士。同年名古屋大学工学部助手。2000年同助教授を経て、2006年同教授、現在に至る。この間、1998年から1年間、U.C.Berkeley客員研究員。2012年からJST-CREST、2017年からJST-未来社会創造事業の研究代表者を務める。 制御工学、特にモビリティシステムを対象とした人間-知能化機械系、自律移動ロボット、ならびにエネルギーマネジメントとの融合によるスマートコミュニティ設計に関する研究に従事。ICAS2017、ICAMechS2013でBest paper Award受賞、ICCAS2008でOutstanding paper award受賞、そのほか、計測自動制御学会論文賞・友田賞、自動車技術会論文賞、電気学会論文賞、などを受賞。 |
|
|
詳細プロフィール |
|
|
メールアドレス |
t_suzuki[at]nuem.nagoya-u.ac.jp |
 名古屋大学 大学院工学研究科
名古屋大学 大学院工学研究科ユニットについて
|
本ユニットでは、高齢者にとって安全で、かつ受容性の高い操作介入・情報提示連動型の運転支援の実現を目指しています。また、運転支援を経験することで、運転者自身の運転行動特性が改善されるような、新たな運転支援のコンセプト作りに取り組んでいます。これは、運転教習員があたかも隣に乗車しているかのような支援の実現を意味しており、高齢者に大きな安心感を与える支援になると期待しています。 具体的な戦略としては、従来型の「危ないから支援する」的な支援ではなく、「してはいけないことをさせないよう早い段階で誘導する」的な支援へとパラダイムシフトをはかることでこのコンセプトを実現できると考えており、システム科学、人間工学、認知科学の最先端の知見を結集してこの考え方を具現化していきます。 |
クリックして拡大 |
||
|
詳細/関連 |
|||
|---|---|---|---|
|
メンバー |
三輪 和久 名 下條 朝也 |
奥田 裕之 名 二宮 由樹 名 |
|

主な研究・開発成果
|
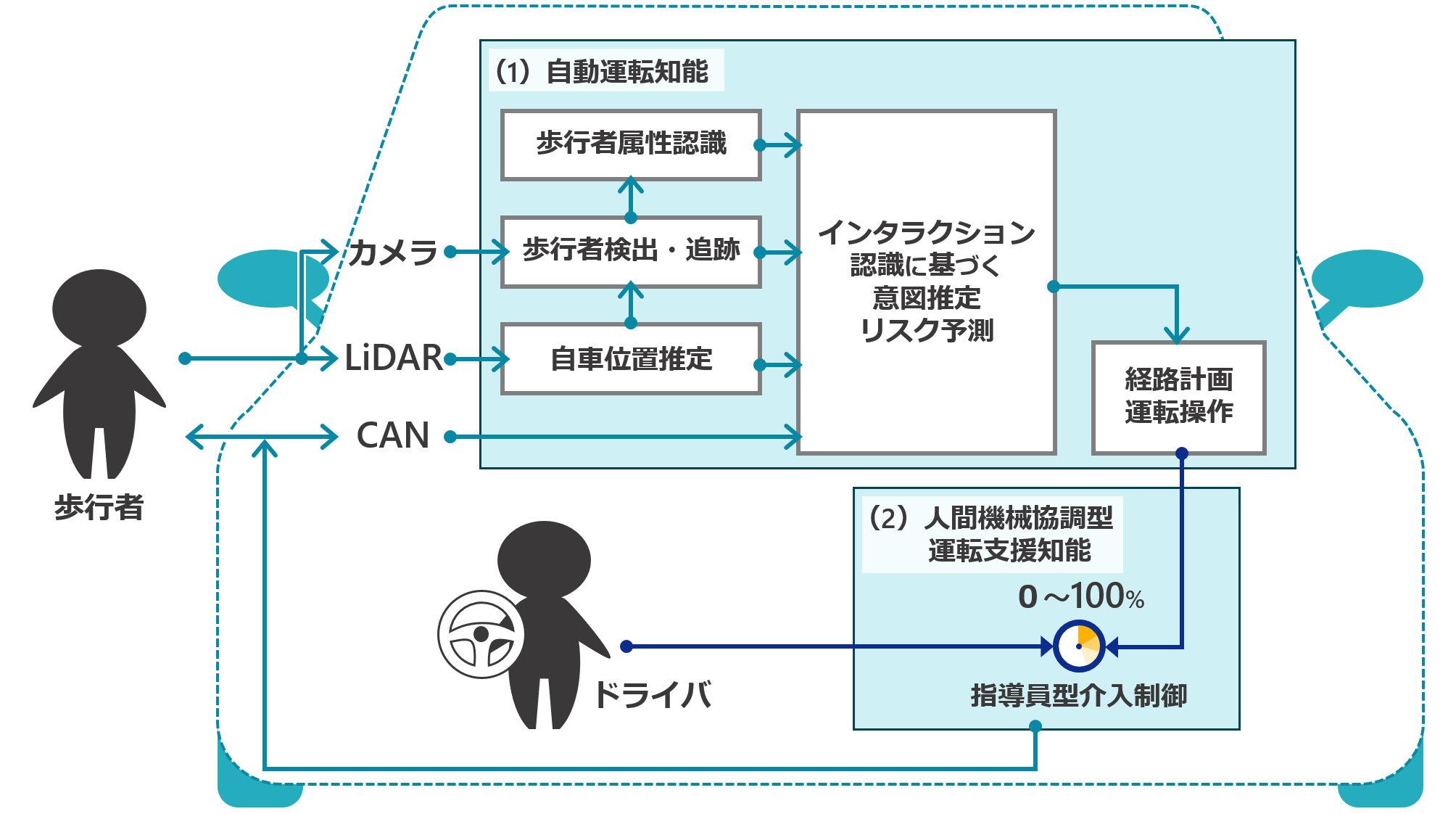
運転知能アーキテクチャ(2020年9月) 知能化モビリティグループでは、交通事故や運転ストレスの低減を可能にする「ドライバの認知・判断・操作を支援する知能化モビリティ」の観点から研究開発を進めています。 出会い頭や右左折、合流における事故の防止、および他者とのインタラクションをともなう制御介入型支援の実現を目指し、(1)自動運転サービス向けの自動運転知能(環境理解グループ)、(2)指導員型運転支援システム向けの人間機械協調型運転支援知能(人間機械協調制御グループ)の研究開発を行っています。 我々が実現を目指す運転知能は、自車位置推定、インタラクション認識、および指導員型介入制御を特徴としています。 |
クリックして拡大 |
|
|
自車位置推定(2020年9月) 自車位置推定とは、自動車自身がいまどこを走っているのかを認識する技術のことで、自動運転の根幹にある処理と言えます。 続きを読むまず、深層学習を導入することで、高精度な自車位置推定と失敗検知を実現しました〔赤井ら,2019〕〔動画1〕。 しかしながら、深層学習によるもののため、どのように推定したのか、その論理は暗黙的なものでした。そのため、現在は失敗を客観的に説明することができる自車位置推定の一般理論の構築を進めています。そして、測距情報全ての相互関係を重視し、人間のように俯瞰して、測距情報と地図情報を照合することで、より高精度な自車位置推定とその失敗の検知を実現しました〔Akai, et al., 2019〕〔動画2〕。 また、従来は、路上の物体を明示的に認識せずに自車位置推定を行ってきました。しかし、周囲環境の変化に対する頑健性を向上させるためには、観測物体の属性(地図上での存在,道路,建物等)を考慮することが重要となります。そこで、物体認識と同時に自車位置を推定する技術を開発しました。属性として、観測物体が地図に存在するか否かを扱うことで、高精度な自車位置推定が可能となり、動的な環境においても計算・メモリコストを増大させることなく、頑健性を向上させることが実現しました〔赤井ら,2019〕〔動画3〕。 |
||
|
動画1|Reliability estimation of vehicle localization result -experiments part- |
動画2|Misalignment recognition using Markov random fields for detecting localization failures |
|
|
動画3|Mobile robot localization considering class of sensor bservations |
||
|
||
|
歩行者の意図や行動の推定(2020年9月) 自動運転車が安全に円滑に交通参加するためには、歩行者が道路を横断するのかどうか、その意図や行動を推定する必要があります。その際、どういったコースを歩いているか(歩行軌跡)に着目するだけでは不十分です。年齢や体と顔の向き、歩きスマホ、アイコンタクトなどの歩行者の属性を認識し、さらには自車の状態との相互関係(インタラクション)を考慮することが重要です。 |
クリックして資料へ |
|
続きを読む本グループでは、まず、画像に映る歩行者の姿勢を推定し、関節の位置と見えに機械学習を適用することによって、顔と体の向きだけでなく、歩きスマホ状態か否かも高精度に認識する技術を開発しました〔Shinmura, et al., 2017〕〔動画〕。 そして、教習所の教官などの規範ドライバは高度に歩行者の横断意図や行動を推定しながら運転していると仮定し、自動運転車が倣うべき規範ドライバの判断を推定する技術の開発を進めました。自車の速度、歩行者の属性、双方の相対位置に深層学習を適用することにより、アクセル操作(ONかOFFか)の判断について、高精度な推定を実現しました〔資料1〕〔Shinmura, et al., 2018〕。 現在は、自車の状態を考慮して歩行者の行動を予測し、それに応じて自車が取るべき判断を先読みするインタラクションモデルの構築を進めています。 |
||
|
動画1|歩行者の歩きスマホの認識 |
||
|
||
|
指導員型運転支援システム(2020年9月) 現在、高齢者向け運転支援システムが社会的に求められています。しかし、支援に頼りっきりになると、運転能力の低下を引き起こす可能性があります。 そのため、我々はドライバ自身の運転特性が改善される、つまりは「ドライバを育てる運転支援システム」が必要だと考えました。その実現のために、まるで教習所の指導員が隣にいるように、安全運転の時には見守り、危ない時には手助け(介入)するシステムを開発しました。認知科学的視点からのその学習効果を評価した結果、システムを利用することで運転がうまくなることがわかりました。 新たに開発した運転支援システムとその効果の詳細は、ぜひ動画にてご確認ください。 |
||
|
知能化モビリティ研究紹介ポスター 自動車を運転する際の認識・予測、判断、制御の各機能を実時間で精度よく実行する運転知能に関する研究・開発について、ポスターにまとめました。 |
クリックして資料へ |
|
|
「高齢者が元気になるモビリティ社会」を支える研究開発技術 名古屋COI拠点が目指す「高齢者が元気になるモビリティ社会」を支える研究開発技術について、創出する価値(町に出よう⇒安全・安心に、楽しく行こう⇒元気にいこう)と研究開発技術(スマートエージェント⇒実験車両・ドライビングシミュレータ)との関係を一枚の絵で表現しました。 |
クリックして資料へ |
|




