モビリティ研究 人間・加齢特性研究
人間・加齢特性グループ、支援手法開発グループ
人間・加齢特性研究では、健康寿命や運転寿命を延伸することで、高齢者も積極的に外出して活動的な暮らしができる社会の実現を目指します。具体的には、生活や運転に関する身体特性や認知機能、健康状態の理解を通じて、個人に最適化した、運転能力を保つための運転支援に関わる技術の開発を行います。これらの技術を実現するための基盤となる、世界的にも例を見ない、高齢者の生活と運転に関する身体特性及び認知機能を含む包括的な人間特性データベース「Dahlia」の構築を行っています。

| Keyword |
ドライバ運転特性、運転支援、運転評価 |
|---|
グループ体制
人間・加齢特性グループ
|
青木 宏文
早稲田大学理工学部機械工学科卒業、東京工業大学大学院総合理工学研究科人間環境システム専攻修了。博士(工学)。認定人間工学専門家。カリフォルニア大学デービス校大学院心理学専攻(EAP,文部省短期派遣奨学生)、マサチューセッツ工科大学,National Space Biomedical Research Institute研究員、トヨタ自動車(株)東富士研究所、名古屋大学大学院工学研究科特任准教授を経て、現在は名古屋大学未来社会創造機構特任教授,モビリティ社会研究所企画戦略室長,オープンイノベーション室プロジェクト・クリエイティブ・マネージャー(モビリティ部門)。自動車技術会本部理事・中部支部担当理事。IEEE EmergiTech2016 Best Paper Award、 ITS World Congress2013 Best Paper Award 他。 |
|
|
詳細プロフィール |
|
|
メールアドレス |
hiro.aoki[at]nagoya-u.jp |
 名古屋大学 未来社会創造機構
名古屋大学 未来社会創造機構|
島崎 敢
静岡県立大学卒業.3年間のトラックドライバ経験を経て早稲田大学大学院に進学し博士(人間科学)の学位を取得.早稲田大学助教,防災科学技術研究所特別研究員などを経て現職.ドライバのハザード知覚・リスク認知・運転計画・メタ認知などの要因と,行動改善のための介入・教育方法について研究している心理学者です.全ての一種免許と大型二種免許と主幹総合交通心理士という資格を持っています. |
|
|
詳細プロフィール |
|
|
メールアドレス |
shimazakikan[at]coi.nagoya-u.ac.jp |
 名古屋大学 未来社会創造機構
名古屋大学 未来社会創造機構|
視覚や認知、身体機能などの人間特性と、運転行動との関係を解明することで、高齢者を含むすべてのドライバが安全・安心に運転するための個人に最適化した運転支援技術開発や、運転に関わる能力の維持・向上手法の開発に繋げることを目指しています。50代から90代のドライバの人間特性と運転行動を経時的に収集、データベース化し、運転能力の評価手法や指標などの“ものさし”を作っています。そこから得られる個人毎の「運転能力カルテ」に従い、個人の運転能力に合わせた支援法を提供します。 |

クリックして拡大 |
||
|
メンバー |
寺﨑 浩子 飯髙 哲也 名 岩本 邦弘 名 武田 夏佳 名切 末晴 上田 多佳子 |
尾崎 紀夫 名 米川 隆 小嶋 理江 名 大島 明子 山内 さつき 平野 昭夫 |
入谷 修司 伊藤 逸毅 稲上 誠 青木 邦友 新海 裕子 |
|---|---|---|---|
|
他機関 ※名古屋大学客員 |
赤松 幹之※ 平田 豊※ |
佐藤 稔久 市川 政雄※ |
岩瀬 愛子※ 荒川 直子※ |
支援手法開発グループ
|
田中 貴紘 名古屋大学 未来社会創造機構
東京工業大学 大学院総合理工学研究科 博士後期課程修了。 |
|
|
詳細プロフィール |
|
|
メールアドレス |
tanaka[at]coi.nagoya-u.ac.jp |

|
支援手法開発グループ |
金森 等
トヨタ自動車(株)研究開発部門で車両性能開発に長年にわたり従事。 クルマのユニバーサルデザイン開発や、ナビ・運転支援システムなどのヒューマンインターフェース開発で、人間中心のクルマ・システムのあり方(指標、基準)や製品開発を人間工学機能リーダとして推進してきました。 名古屋大学COIの目指す姿に共感し、H26年4月から未来社会創造機構で研究活動を始めております。将来のモビリティが『一人ひとりの笑顔』に貢献できるように、身体機能からの必然的ニーズとココロの欲求に応えるための基礎研究と具現化手法開発に尽力します.加えて、企業や自治体と協同で社会実装に繋げます。 |
|---|---|
|
詳細プロフィール |
|
|
メールアドレス |
hitoshi_kanamori[at]coi.nagoya-u.ac.jp |
 名古屋大学 未来社会創造機構
名古屋大学 未来社会創造機構ユニットについて
|
人間・加齢特性グループの基礎研究から得られたデータや知見を活用し、高齢ドライバが安全に安心して、より長く運転を続けられるための支援方策を開発しています。 安全な運転遂行のために、低下した視覚や認知、身体機能などを補完するクルマ側での支援だけでなく、今の自分の状態に合った運転の仕方へ自らアップデートできるよう支援するドライバエージェントの研究・開発を推進中です。産学連携や学際的アプローチにより、研究成果を様々なサービスや製品に展開し確実な社会実装を目指しています。 |
クリックして拡大 |
||
|
メンバー |
米川 隆 原田 あすか |
吉原 佑器 名 田辺 弘子 名 |
KARATAS Nihan |
|---|---|---|---|
|
他機関 ※名古屋大学客員 |
赤松 幹之※ 藤掛 和広 |
小栗 宏次※ |
河中 治樹 |

主な研究・開発成果
|
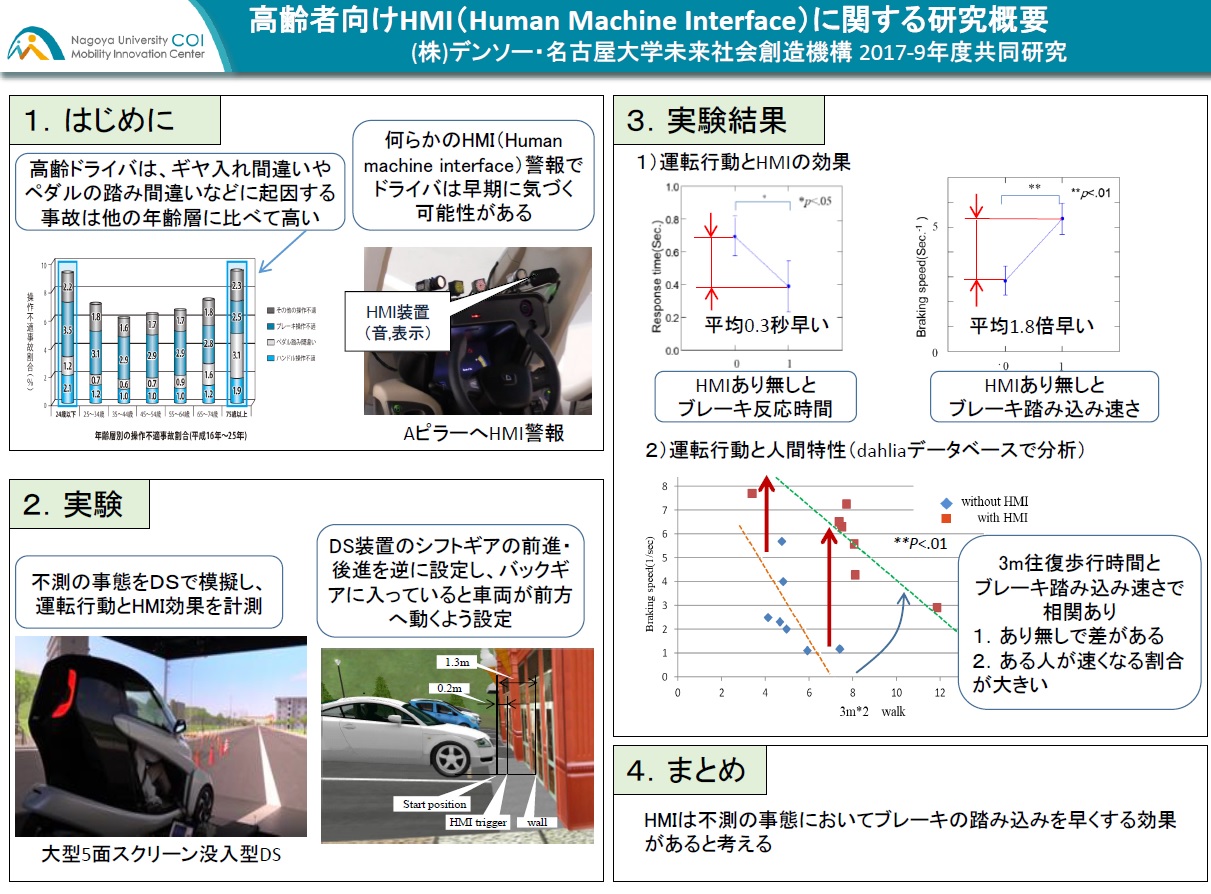
高齢ドライバデータベース(DAHLIA)(2020年9月) 私たちは、安全運転を支援するアプリケーションの迅速な社会実装を後押しするため、開発に必要なデータを収集しています。 高齢ドライバによる事故が近年問題になっています。加齢による心身機能の低下が事故につながっていると考えられていますが、その関係はまだ十分には明らかになっていません。なぜなら、人間特性と運転の関係を紐づけて分析できるデータセットがないためです。 |
資料へのリンク |
|
続きを読む安全運転を支援するアプリケーションの開発には、心身機能と運転能力の関係解明が必要だと考え、「高齢者運転特性データベース(Data Repository for Human Life-Driving Anatomy; DAHLIA)」の構築を進めています。運転に関連する幅広い項目を同じドライバから継続的に収集することで、様々な関係を複合的・縦断的に分析することを可能としました。加えて、本データベースの参加者を対象に追加実験を行うことで、短期間に必要なデータを得ることも可能です。すでに本データベースの仕組みを活用した企業との共同研究により、安全運転支援装置の製品化に至っています。 |
||
|
運転行動の改善を促すドライバエージェント(2020年9月) 私たちは、小さなロボットがいつもドライバの隣にいて、より安全運転につながるようアドバイスをしてくれるシステムを研究開発しています。 |
資料へのリンク |
|
続きを読む本人が安全運転を心がけていたとしても、本当にそれが出来ているかを自分で判断することはむずかしいものです。たとえば助手席に運転指導員がいてアドバイスをしてくれると便利ですが、非現実的です。かといって、家族などからのアドバイスは素直に受け取りづらい人もいるでしょう。 私たちが研究開発しているシステムは小さなロボットに搭載することを想定しています。この小さなロボットは、運転中には車内外の環境やドライバの状態に基づいて、より安全運転になるような声掛けをしてくれます。一方、運転後は、たとえば自宅のリビングなどで、一緒に今日の運転を映像とともに振り返り、必要に応じてアドバイスなどもしてくれます。 |
||
|
動画|安全運転の意識を高め改善を促すドライバエージェント(名古屋大学COI 支援手法開発グループ) |
||
|
ドライバーエージェント:運転行動改善を促すロボット シンポジウムにて、名古屋COI拠点が目指す「高齢者が元気になるモビリティ社会」を実現するためのロボット、ドライバーエージェントについて、コンセプトと実証実験の結果ご紹介しました。 |
資料へのリンク |
|
|
後付け可能な「踏み間違い加速抑制システム」の開発に協力(2018年12月5日販売開始) 高齢ドライバなどに多いブレーキとアクセルの踏み間違い事故を防ぐため、株式会社デンソーと共同で「踏み間違い加速抑制システム」を研究開発しました。 高齢者でも見やすくわかりやすいアラートとなるよう工夫し、安全性を高めました。2018年12月より株式会社デンソーが製品化し、トヨタ車両販売店を通じて、全国で販売されました。 |
資料へのリンク |
|