
協調領域研究
ゆっくり自動運転®グループ
ゆっくり自動運転®は、低速度で人や社会と協調する自動運転技術で、無人運転による地域内移動サービスを提供することができます。超小型車からバスまで様々な車両に適用でき、ラストマイル交通、地域内巡回交通、カーシェアリング回送、自動バレーパーキングなどへの応用が考えられます。
昨今、様々な移動手段の情報・予約・決済を一括のアプリで処理できるMaaS(Mobility as a Service)が世界的に注目されています。名古屋大学COIでは、交通不便地域における高齢者等の移動困難者を主な対象としたモビリティサービス“Mobility Blend®”を構築しており、その中でのラストマイル交通など単純な輸送部分を順次ゆっくり自動運転に置き換えていくことを計画しています。
地域に即した総合的な移動サービスにおける自動運転のあり方を検討することで、ゆっくり自動運転の社会実装を目指します。

| Keyword |
低速度・地域限定自動運転、MaaS、ラストマイル交通、地域内交通、 カーシェアリング回送、自動バレーパーキング、中山間地域、ニュータウン |
|---|
グループ体制
ゆっくり自動運転®グループ
|
森川 高行 名古屋大学 未来社会創造機構 交通システム分析を専門にしています。とくに、人間の行動原理に基づいた、交通行動分析や交通需要予測に取り組み、それを応用して新しい交通政策の提案をしてきました。最近は、ITS(高度道路交通システム)や自動運転を含む次世代自動車の活用が、交通システムや地域にどのような影響を与えるかの研究に取り組んでいます。理論研究だけでなく、実証実験的研究に力を入れており、足助プロジェクトも、平成24・25年度に行った「総務省ICT街づくり事業」で構築した人的・システム的基盤があったからこそ立ち上げられたと思っています。 |
|
|
詳細プロフィール |
|
|
メールアドレス |
morikawa[at]nagoya-u.jp |

サービス構築ユニット
|
金森 亮 名古屋大学 未来社会創造機構 交通政策の導入・運営に関する取り組みを行っており、交通行動分析、交通需要予測を専門としています。最近は自動運転技術や最適配車技術を活用した交通サービスの導入評価・影響分析に関心があり、実証実験を通じてデータ分析、合意形成などに関する研究に従事しています。 |
|
|
詳細プロフィール |
|
|
メールアドレス |
kanamori.ryo[at]nagoya-u.jp |

ユニットについて
|
本ユニットは、ゆっくり自動運転技術を地域に即した交通サービスとして社会実装することを目標としています。利用者ニーズと提供者ニーズの両面からの要望の把握と調整、技術を改善する仕組みの構築に取り組みます。例えば、シナリオ設定に応じた実証実験の企画、アンケート調査データ分析による利用意向や受容性の把握を繰り返し、既存の公共交通サービスとの融合方法を検討します。 |
|||
|
メンバー |
中村 俊之 名 |
||
|---|---|---|---|
運転知能構築ユニット
|
赤木 康宏 名古屋大学 未来社会創造機構 自動運転車の走行システム研究・開発を専門としています。特に市街地での自動走行を実現するための運転行動判断機能の研究を通じて、ゆっくり自動運転を社会実装するための車両開発・実証実験を実施しています。 |
|
|
詳細プロフィール |
|
|
メールアドレス |
akagi-y[at]coi.nagoya-u.ac.jp |

ユニットについて
|
市街地での自動運転を実現するための運転知能を開発しています。運転知能の構築とは、運転に関する「認知」「判断」「操作」を人間の代わりにコンピュータが自律的に実行できるようにする知能を開発することです。この運転知能によって、交差点や横断歩道、歩行者や対向車等の交通状況を理解し、適切な運転行動を自動的に生成します。 |
|||
|
メンバー |
奥田 裕之 名 |
立石 定芳 |
|
|---|---|---|---|
主な研究・開発成果
|
ADENU ~自動運転車用ソフトウェアパッケージ~ ADENUは自動運転車用のソフトウェアパッケージです。 主要な機能としては、各種センサデータの取得、地図データの管理、地図とセンサを融合した走行環境理解、経路計画の生成、車両への制御指令機能があり、自動運転車等の走行に必要な機能が全て含まれています。市街地でのMaaSや施設内の人や物の輸送などに利用可能です。 |
資料へのリンク |
|
ゆっくりコムス |
|
|---|---|
|
ベース車両:コムス レーザーセンサ(LiDAR)で周辺環境を認識し、3次元地図データを踏まえて今自分がどこにいるかを推定します。次に、対向車や歩行者の挙動を先読みし、軌道生成技術で最適な走行経路を決めます。これを繰り返すことで、自動走行が可能となります。 加えて、自動運転車がどう動くかを周囲の歩行者や他車に伝える情報を表示する「インフォディスプレイ」を搭載し、周辺環境と調和した状態となるようにしています。 |
|
|
ゆっくりカート 1号機 |
|
|
ベース車両:電動ゴルフカート 誘導線方式ではない、日本初の自動運転ゴルフカートです。 乗員の安全のための安全ベルトを装着するなどの改造を経て、公道を走れるよう軽自動車としての登録を行いました。 |
|
|
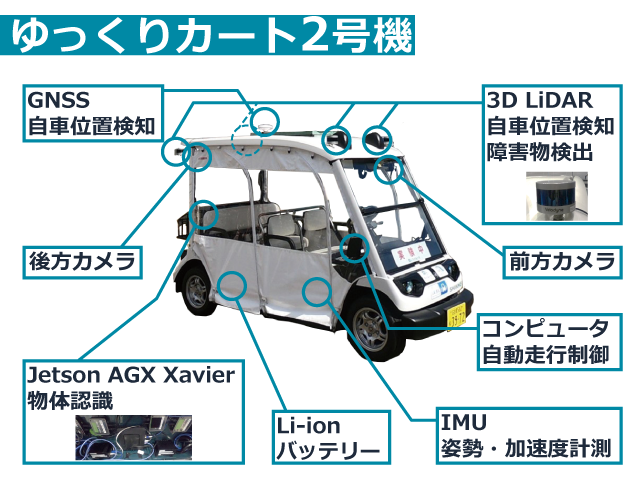
ゆっくりカート 2号機 |
|
|
ベース車両:電動ゴルフカート 3次元点群地図を用いた自動運転ゴルフカートです。 ゆっくりカート2号機では、LiDARを屋根の4隅に配置することで、死角を低減させています。 乗員の安全のための安全ベルトを装着するなどの改造を経て、公道を走れるよう軽自動車としての登録を行いました。 |
|
|
ゆっくりバン |
|
|
ベース車両:ミニバン コミュニティバスでの利用を想定した車両です。 共同研究開発機関である新明工業株式会社と協働で、市販車を自動運転車両にしました。 自動運転用ソフトウェアパッケージ「ADENU」を搭載しています。 |
|
|
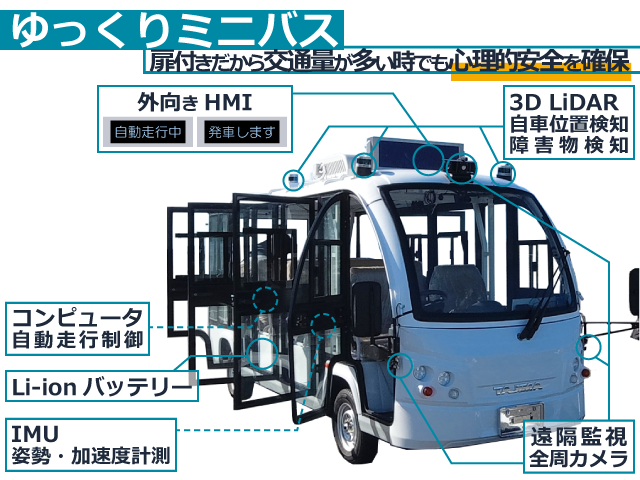
ゆっくりミニバス |
|
|
ベース車両:TAJIMA-NAO-8J オペレーターなどの運行スタッフを除いた乗車定員が6名と、これまでの車両と比べて最大の人数となる車両です。 扉があるため心理的安心感の確保が見込めるため、交通量の多い道路での走行に適しています。 また、車両上部には、自動運転車がどのように動くかを歩行者や他車両に示す外付けHMIを搭載することで、周囲との調和を図ります。 |
|



名古屋大学COIでは、自治体などの協力のもと、公道などで公開実証実験を行っています。
※上に行くほど新しい情報です。
| 2021(令和3)年度 | ||
|---|---|---|
| 2021/06/21~08/27 |
愛知県 春日井市 高蔵寺ニュータウン 紹介記事 使用車両:ゆっくりカート2号機、ゆっくりミニバス |
|
| 2020(令和2)年度 | ||
| 2021/03/15、16 |
愛知県 豊田市 稲武地域 使用車両:ゆっくりミニバス |
|
| 2021/02/15~03/12 |
愛知県 春日井市 高蔵寺ニュータウン 使用車両:ゆっくりカート2号機、ゆっくりミニバス |
※新型コロナ禍のため技術実証のみ |
| 2021/01/11~01/24 |
兵庫県 南西部 播磨科学公園都市 使用車両:ゆっくりカート1号機 |
|
| 2020/12/07~12/25 |
静岡県 伊豆高原エリア 使用車両:ゆっくりミニバス |
|
| 2020/11/30~12/08 |
静岡県 下田市 使用車両:ゆっくりミニバス |
|
| 2020/10/21~11/27 |
愛知県 春日井市 高蔵寺ニュータウン 使用車両:ゆっくりカート2号機 |
|
| 2019(平成31/令和1)年度 | ||
| 2020/02/13~02/27 |
愛知県 春日井市 高蔵寺ニュータウン 使用車両:ゆっくりカート2号機 |
|
| 2019/11/12~11/22 |
愛知県 春日井市 高蔵寺ニュータウン 紹介記事 使用車両:ゆっくりカート2号機 |
※手動で自動運転を模擬 |
| 2019/04/28~29 |
兵庫県 神戸市 紹介記事 使用車両:ゆっくりカート2号機 |
|
| 2018(平成30)年度 | ||
| 2019/02/25・26 |
愛知県 春日井市 高蔵寺ニュータウン 紹介記事 使用車両:ゆっくりカート1号機、2号機 |
|
| 2018/11/01 |
愛知県 豊田市 稲武地区 紹介記事 使用車両:ゆっくりカート2号機 |
|
| 2017(平成29)年度 | ||
| 2018/03/05 |
愛知県 春日井市 高蔵寺ニュータウン 紹介記事 使用車両:ゆっくりカート1号機 |
|
| 2017/11/27 |
愛知県 豊田市 足助地区 紹介記事 使用車両:ゆっくりコムス |
|
|
NU COIリサーチ(動画) |
|---|
|
高蔵寺ニュータウンスマートシティプロジェクト(公開:2020年08月24日) 英語ショートバージョン(公開:2020年08月24日) |
|
コンセプト紹介(公開:2018年02月22日) |
|
NU COIマガジン(記事) |
|
ゆっくり自動運転®が拓く未来 (掲載:2018年07月25日) 自分で運転できない人にとって、公共交通は頼みの綱だが、公共交通ならではの不便さもある。しかし、「ゆっくり自動運転」があれば、その不便さも解消される。 |
更新:2021年07月

