サステナブル基盤研究
サステナブル基盤グループ
サステナブル基盤グループでは、高齢者やスマートチェア、ロボットの家族が適切なつながりをもって活き活きと暮らし、心豊かでサステナブルな(持続性のある)社会を実現するシステム統合技術基盤を構築します。椅子や車などの環境にセンサを設置して高齢者をさりげなくセンシングすることで、個々人の生活情報や体調などの情報に生理的な意味を加えたデータベースを構築し、さらに、システムと人を結ぶ知能エージェントを開発します。これらを統合することで、人々の多様な価値観(健康、エコ、好みなど)に応じて、その日の健康状態等が「気づき」を促すような形で個々人に提示され、気持ちをプラスにする空間を演出します。我々はシステムが人間の行動を理解し、個々人に応じた気配りを行う、気配り支援システムの開発を目指します。

| Keyword |
人間・環境計測、非侵襲生体センシング、エージェント、生活支援、 宅内ロボット |
|---|
グループ体制
サステナブル基盤グループ
|
名古屋大学 大学院情報学研究科 マルチモーダルインタラクション、ウェアラブルコンピュータ、IoT、ユビキタスコンピューティング、コミュニケーション支援、表情認識、体験共有、技の伝承、e-コーチング、医療介護支援などの研究に従事。 電子情報通信学会ヒューマンコミュニケショングループ(HCG)委員長(2021)、情報処理学会東海支部長(2020)、IEEE名古屋支部長(2013-2014)、人工知能学会 理事(2009−2011)、JST共生インタラクションCREST領域総括(2017-2025)、第24期・第25期日本学術会議連携会員、などに従事。電子情報通信学会フェロー(2009−)。 |
|
|
詳細プロフィール |
|
|
メールアドレス |
mase[at]nagoya-u.jp |
 間瀬 健二
間瀬 健二|
サステナブル基盤 |

新井 史人 東京大学 大学院工学研究科 マイクロ・ナノメカトロニクス、マイクロ・ナノロボット工学、バイオロボティクス、バイオニックシステム、センサ・アクチュエータ等の研究に従事。IEEE Robotics and Automation Society,Vice President(副会長)(2014-)、IEEE Robotics and Automation Society,AdCom Member(理事)(2010-2011, 2012-2014)、Advanced Robotics,Editor in Chief(2012.4-)、日本ロボット学会 理事(2012-2013)、日本機械学会ロボメカ部門 部門長(2013)、化学とマイクロ・ナノシステム学会 会長(2014-2015)などに従事。 |
|---|---|
|
詳細プロフィール |
|
|
メールアドレス |
arai[at]mech.nagoya-u.ac.jp |
グループについて
|
メンバー |
山田 陽滋 名 |
丸山 央峰 名 |
榎堀 優 名 |
|---|---|---|---|
|
他機関メンバー |
山田 和範 |
横矢 真悠 |
主な研究・開発成果
|
パナソニック株式会社は施設向けサービスを提供を開始しました(2021年4月27日発表) パナソニック株式会社は、2021年4月より、歩行トレーニングロボットを用いた「歩行トレーニング支援サービス」を、介護・福祉施設や病院などを対象に開始しました。 歩行トレーニングロボットは、押して歩くだけで一人一人に合った最適なトレーニングの提供と、その結果を自動で計測・記録する機能を備えています。そのため、利用者にとっては自分に合ったトレーニングが受けられるというメリットがあり、施設や病院のスタッフにとってもトレーニング結果の管理業務における負担が軽減されるというメリットがあります。
この歩行トレーニングロボットの研究開発は、サステナブル基盤グループにおいてパナソニック株式会社と名古屋大学などが共同で進めてきました。 本サービスの社会実装により、「いくつになっても、自分の足で歩きたい」という想いを叶えることで、「高齢者が元気になるモビリティ社会」の実現に、また一歩近づいたと思っております。 |
||
|
歩行トレーニングロボット Walk training robo 「いくつになっても、自分の足で歩きたい」 そのような願いを叶える歩行トレーニングロットを開発しています。 超高齢化が進む日本において、できるだけ長く、自立した生活を送りたいと願う人は、今後ますます増えていくでしょう。そのために重要なことのひとつが、自分の足で歩くこと、と私たちは考えました。そして、歩きたくなる「気持ち」へのサポートを、歩行トレーニングロボットという形で実現しました。 |
資料へのリンク |
|
続きを読むこのロボットは、2つの独自技術により、押して歩く機能だけでなく、安心で適切な歩行トレーニングも提供することで、人々の自立をサポートします。
加えて、歩行能力といった身体機能だけでなく、同時に認知機能も鍛えられるトレーニングプログラムも研究開発中です。 |
||
|
|
|
|
|
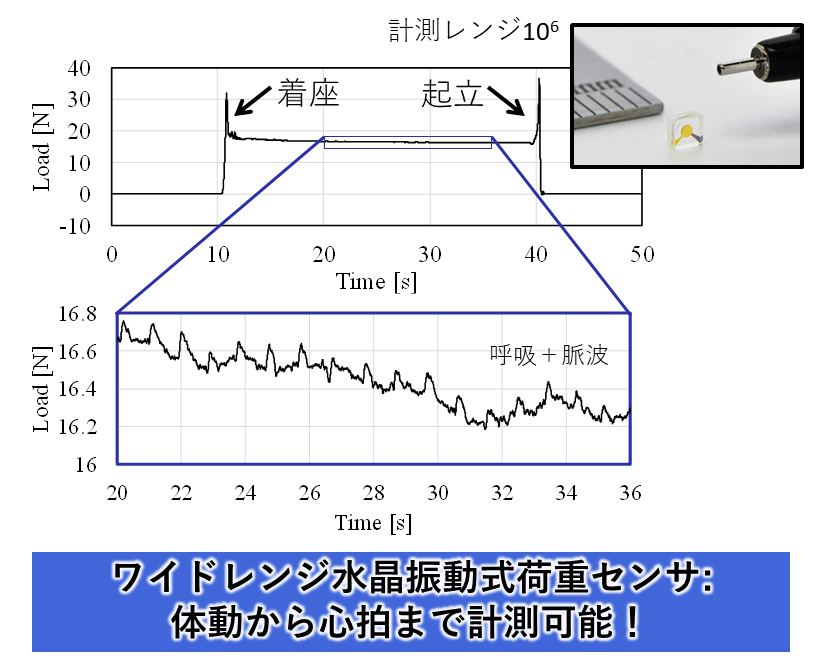
水晶振動式荷重センサ 10の6乗の計測レンジを有する水晶振動式荷重センサを実現しました。一般的な力センサの100倍から1000倍程度のワイドな計測レンジを有しています。水晶振動式荷重センサを歩行トレーニングロボットに搭載することにより、人がロボットのハンドルを握るだけで、脈波や呼吸によって生じる微小な荷重変動が計測可能となりました。これにより、歩行能力の評価だけでなく、バイタルのモニタリングの実現が期待されています。 |
|
|